
Какие волны используются для радиолокации и в телевидении
Опубликовано: 22.04.2024
Диапазоны частот и длин волн
Спектр электромагнитных полн простирается до частот выше 10 24 Гц. Этот очень широкий сложный диапазон делится на поддиапазоны с различными физическими свойствами.
Разделение частот по поддиапазонам ранее выполнялось в соответствии с исторически сложившимися критериями и в настоящее время устарело. Это привело к возникновению современной классификации диапазонов частот, которая в настоящее время используется на международном уровне. Однако в литературе все еще можно встретить традиционно сложившиеся названия диапазонов частот.
На Рисунке 1 изображен диапазон частот, занятый электромагнитными волнами, и показано его деление на поддиапазоны.

Рисунок 1. Диапазоны частот и длин волн, используемые в радиолокации

Рисунок 1. Диапазоны частот и длин волн, используемые в радиолокации
Рисунок 1. Диапазоны частот и длин волн, используемые в радиолокации
В верхней части рисунка показано деление спектра электромагнитных волн, сложившееся исторически и официально принятое Институтом инженеров по электротехнике и радиоэлектронике (Institute of Electrical and Electronic Engineer, IEEE) . В нижней части рисунка показана современная классификация диапазонов частот, принятая для использования в структурах НАТО. Видно, что границы частотных диапазонов в этих двух классификациях не всегда совпадают.
Диапазоны и поддиапазоны частот называют заглавными буквами. Такой подход возник еще на заре радиолокации, когда точное значение рабочей частоты радиолокационного средства старались держать в тайне.

Рисунок 2. Некоторые радиолокаторы и их диапазоны частот

Рисунок 2. Некоторые радиолокаторы и их диапазоны частот
Рисунок 2. Некоторые радиолокаторы и их диапазоны частот
Радиолокационные системы работают в широком диапазоне излучаемых частот. Чем выше рабочая частота радиолокатора, тем сильнее влияют на распространение электромагнитных волн атмосферные явления, такие как дождь или облака. Но одновременно с этим на более высоких частотах достигается лучшая точность работы радиолокационного средства. На Рисунке 2 показаны диапазоны частот электромагнитных волн, используемые радиолокационными средствами.
А- и В-диапазоны (ВЧ и ОВЧ)
В русскоязычной литературе эти диапазоны называют диапазоном высоких частот (ВЧ) и диапазоном очень высоких частот (ОВЧ, иногда — метровым диапазоном), в англоязычной — диапазоном HF (High Frequency) и диапазоном VHF (Very High Frequency) .
Эти радиолокационные диапазоны ниже 300 МГц имеют давнюю историю применения, поскольку именно в этих диапазонах активно развивались радиотехнологии в годы Второй мировой войны. В настоящее время эти частоты используются в радиолокаторах раннего обнаружения и так называемых загоризонтных радиолокаторах (Over The Horizon, OTH) . Для таких низких частот легче строить высокомощные передатчики. Затухание электромагнитных волн на таких частотах меньше, чем при использовании более высоких частот. С другой стороны, точность таких радиолокаторов ограничена, поскольку низкие частоты требуют антенн с очень большими физическими размерами, что определяет точность измерения и разрешающую способность по угловым координатам. Кроме того, эти диапазоны частот используются и другими службами, связью и радиовещанием, поэтому полоса частот для радиолокаторов ограничена (что, опять же влияет на точность и разрешающую способность).
Однако, в последнее время, интерес к использованию этих диапазонов частот в радиолокации возвращается, поскольку на этих частотах технологии снижения радиолокационной заметности Stealth не обеспечивают требуемого эффекта.
С-диапазон (УВЧ)
Этот диапазон называется диапазоном ультравысоких частот (УВЧ) или дециметровым диапазоном. В англоязычной литературе — Ultra High Frequency (UHF) .
Существует не так много радиолокационных систем, разработанных для этого частотного диапазона (от 300 МГц до 1 ГГц). Эти частоты хорошо подходят для радиолокационного обнаружения и сопровождения спутников и баллистических ракет на больших расстояниях. Радиолокаторы, работающие в этом диапазоне частот, используются для раннего обнаружения и предупреждения о целях как, например, обзорный радиолокатор в системе противовоздушной обороны средней дальности MEADS (Medium Extended Air Defense System). Некоторые метеорологические радиолокационные системы, например, предназначенные для построения профиля ветра, работают в этом диапазоне, поскольку распространение электромагнитных волн на таких частотах слабо зависит от облаков и дождя.
Новые технологии сверхширокополосной радиолокации (Ultrawideband, UWB) используют все частоты от А- до С-диапазона. Сверхширокополосные радиолокаторы излучают очень короткие импульсы на всех частотах одновременно. Они используются для неразрушающего контроля материалов и объектов, а также как радиолокаторы подповерхностного зондирования (Ground Penetrating Radar, GPR) , например, для археологических исследований.
D-диапазон (L-диапазон)
Этот частотный диапазон (от 1 до 2 ГГц) является предпочтительным для работы радиолокаторов дальнего обнаружения с дальностью действия до 250 морских миль (около 400 километров). Они излучают импульсы высокой мощности с широким спектром и, зачастую, с внутриимпульсной модуляцией. Вследствие кривизны земной поверхности максимальная дальность обнаружения ограничена для целей, находящихся на малых высотах. Такие цели, по мере увеличения дальности, очень быстро исчезают за радиогоризонтом.
В этом диапазоне частот работают радиолокаторы дальнего обнаружения в системе управления воздушным движением, такие как трассовый обзорный радиолокатор (Air Route Surveillance Radar, ARSR) . При объединении с моноимпульсным вторичным обзорным радиолокатором (Monopulse Secondary Surveillance Radar, MSSR) они используют относительно большую медленно вращающуюся антенну.
Если букву L подразумевать как первую в слове Large (большой), то обозначение L-диапазон является хорошей мнемонической рифмой для большого размера антенны или большой дальности действия.
E/F-диапазон (S-диапазон)
В этом диапазоне атмосферное ослабление выше, чем в D-диапазоне. Радиолокаторам, работающим в этом диапазоне, требуется значительно большая излучаемая мощность для того, чтобы достичь хороших значений максимальной дальности действия. В качестве примера можно привести радиолокатор средней мощности MPR (Medium Power Radar) с импульсной мощностью 20 МВт. В этом частотном диапазоне влияние погодных условий сильнее, чем в D-диапазоне. Поэтому несколько метеорологических радиолокаторов работают в E/F-диапазоне но, в основном, в тропических и субтропических климатических зонах, поскольку тут они могут «видеть» за пределами сильного шторма.
Специальные аэродромные обзорные радиолокаторы (Airport Surveillance Radar, ASR) используются в аэропортах для обнаружения и отображения положения самолетов в воздушном пространстве аэропортов, в среднем, на дальностях 50 … 60 морских миль (около 100 км). Аэродромные радиолокаторы определяют положение самолетов и погодные условия в районах как гражданских, так и военных аэродромов.
Обозначение S-диапазона ( Small, Short – малый, короткий), в противоположность обозначению L-диапазона, может трактоваться как обозначение меньших размеров антенн или меньшей дальности действия.
G-диапазон (С-диапазон)
В G-диапазоне (от 4 до 8 ГГц) работают много военных мобильных радиолокаторов (обзора поля боя, управления оружием и наземной разведки) с малой и средней дальностью действия. Размеры антенн обеспечивают отличную точность измерения и разрешающую способность и, при этом, будучи сравнительно небольшими, не препятствуют быстрому перемещению. Влияние плохих погодных условий очень существенно. Поэтому в радиолокаторах этого диапазона, предназначенных для работы по воздушным объектам, часто применяются антенны с круговой поляризацией. Этот диапазон частот отведен для большинства типов метеорологических радиолокаторов, используемых для обнаружения осадков в умеренных климатических зонах, таких как Европа.
I/J-диапазон (X- и Ku-диапазоны)
В этом диапазоне частот (от 8 до 12 ГГц) соотношение между используемой длиной волны и размером антенны существенно лучше, чем в диапазонах более низких частот. I/J-диапазон является сравнительно распространенным в военных применениях, таких как бортовые радиолокаторы, обеспечивающие функции перехвата воздушной цели и ведение огня по ней, а также атаки наземных целей. Очень малый размер антенны определяет хорошую применяемость. Системы наведения ракет в I/J-диапазоне имеют приемлемые размеры для комплексов, для которых важны мобильность и малый вес, а большая дальность действия не является основным требованием.
Этот диапазон частот широко используется в морских навигационных радиолокаторах как гражданского, так и военного применения. Небольшие и недорогие антенны с высокой скоростью вращения обеспечивают значительные максимальные дальности действия и хорошую точность. В таких радиолокаторах используются волноводно-щелевые и небольшие полосковые антенны, размещенные, как правило, под антенными обтекателями.
Кроме перечисленного, этот частотный диапазон распространен в космических и бортовых радиолокаторах построения изображений, основанных на антеннах с синтезированными апертурами (Synthetic Aperture Radar) , предназначенных как для целей военной электронной разведки, так и для гражданского географического кaртографирования.
Специализированные радиолокаторы с обратной синтезированной апретурой (Inverse Synthetic Aperture Radar, ISAR) используются в морских воздушных средствах контроля загрязнения.
K-диапазон (K- и Ka-диапазоны)
Чем выше частота, тем сильнее атмосферное поглощение и затухание электромагнитных волн. С другой стороны потенциальная точность и разрешающая способность тоже возрастают. Радиолокационные системы, работающие в этом диапазоне, обеспечивают небольшую дальность действия, но очень высокое разрешение и высокую скорость обновления данных. В системах управления воздушным движением такие системы используются как радиолокаторы управления наземным движением (Surface Movement Radar, SMR) или (как часть) оборудование для обнаружения на поверхности аэропорта (Airport Surface Detection Equipment, ASDE) . Использование коротких зондирующих импульсов длительностью в несколько наносекунд обеспечивает разрешение по дальности, при котором на экране радиолокатора можно распознать контур самолета или наземного транспортного средства.
V-диапазон
Вследствие явления рассеяния на молекулах (влияние влажности воздуха) затухание электромагнитных волн в этом диапазоне очень высокое. Радиолокационные применения здесь ограничены дальностью действия в несколько метров.
W-диапазон
В этом диапазоне наблюдаются два явления: максимальное затухание вблизи 75 ГГц и относительный минимум на частоте около 96 ГГц. Оба эти эффекта используются на практике. В автомобилестроении небольшие встроенные радиолокационные средства работают на частотах 75 … 76 ГГц в парковочных ассистентах, для просмотра слепых зон и ассистентах торможения. Высокое затухание (влияние молекул кислорода О2) снижает уровень помех от таких радиолокационных средств.
Радиолокационные установки, работающие на частотах от 96 до 98 ГГц, используются в качестве лабораторного оборудования. Они позволяют получить представление о применении радиолокации на чрезвычайно высоких частотах, таких как 100 ГГц.
В книге Merill Skolniks «Radar Handbook» (3-е издание) автор ссылается на более раннее стандартное буквенное обозначение IEEE для радиочастотных диапазонов (IEEE-Std. 521-2002). Эти буквенные обозначения (как показано на красной шкале на Рисунке 1) первоначально были выбраны для описания используемых диапазонов радиолокации еще во время Второй мировой войны. Но в настоящее время используемые частоты превышают 110 ГГц — сегодня существуют генераторы с фазовым управлением до 270 ГГц, мощные передатчики до 350 ГГц. Рано или поздно эти частоты будут использоваться и в интересах радиолокации. Одновременно с этим использование сверхширокополосных радиолокаторов выходит за границы традиционных радиолокационных диапазонов частот.
Различные обозначения радиолокационных диапазонов очень запутаны. Это не составляет трудностей для инженера или техника радиолокатора. Эти специалисты могут работать с различными диапазонами, частотами и длинами волн. Но они, как правило, не занимаются логистикой закупок, например, инструментов для обслуживания и измерения или даже нового радиолокатора целиком. К сожалению, менеджмент логистики, в основном, обучался бизнес-наукам. Поэтому у них будут возникать проблемы с запутанными обозначениями диапазонов. Теперь проблема состоит в том, чтобы утверждать, что генератор частоты для I и J-диапазона обслуживает радиолокатор X-диапазона и Ku-диапазона, а глушитель D-диапазона создает помехи для радиолокатора L-диапазона.
Сверхширокополосные радиолокаторы используют очень широкий частотный диапазон, выходящий за строгие границы классических диапазонов. Как лучше сказать: например, сверхширокополосный радиолокатор работает на частотах от E до H-диапазона, или он использует те же частоты от более высокого S-диапазона до более низкого X-диапазона?
Но пока производители будут называть предлагаемые радиолокационные средства с использованием старых обозначений диапазонов частот, до тех пор IEEE будет объявлять, что новые полосы частот: «… не согласуются с практикой радиолокации и не должны использоваться для описания радиолокационных частотных диапазонов». Я думаю, это всего лишь вопрос времени, и даже IEEE изменит свое мнение. Помните: не так давно метрическая система единиц измерения считалась неуместной в IEEE. И действительно, чтобы описать, какова длина мили, лучше сказать «одна миля», а не «1,853 километра». (Как жаль, что большинство людей в этом мире не знают, какова длина мили.)
Издатель: Кристиан Вольф, Автор: Андрей Музыченко
Текст доступен на условиях лицензий: GNU Free Documentation License
а также Creative Commons Attribution-Share Alike 3.0 Unported License,
могут применяться дополнительные условия.
(Онлайн с ноября 1998 года)
Урок 20. Физика 11 класс


Конспект урока "Радиолокация. Понятие о телевидении. Развитие средств связи"
Человечество было сформировано не императорами,
жрецами, полководцами, а теми, кто создал топор,
колесо, самолет, кто нашел злаки, следил за звездами,
кто открыл железо, полупроводники и радиоволны.
Даниил Гранин
В данной теме речь пойдёт об использовании радиоволн в современном мире, а именно речь пойдет о радиолокации и телевидении. Также поговорим о развитии средств связи.
Электромагнитная волна — это распространяющееся в пространстве периодически изменяющееся электромагнитное поле.
Впервые электромагнитные волны экспериментально получил, передал на расстояние (правда в пределах стола) и принял Генрих Герц. А уже в апреле 1895 года, Александр Степанович Попов создал первый в мире радиоприемник. С этого момента и начинается история развития и использования электромагнитных волн для нужд человечества.
Наиболее широкое применение из всего диапазона электромагнитных волн нашли радиоволны. Все радиоволны можно разделить на 3группы: ультракороткие, короткие и длинные волны.
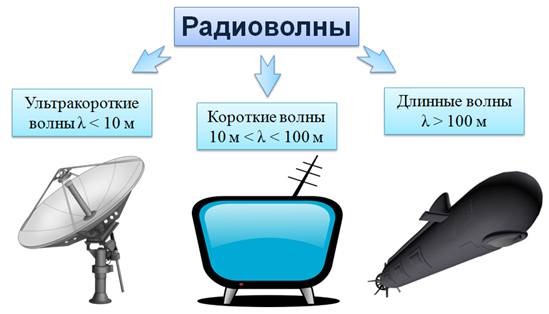
Выбор используемой длины радиоволн зависит от конкретной задачи.
Например, с помощью мегаметровых волн можно держать связь с подводными лодками. Одни из самых распространенных — метровые, чаще всего используют для работы радио и телевидения, а сантиметровые и дециметровые — в радиолокации, т.е. в обнаружении объектов с помощью радиоволн.
На распространение радиоволн очень сильно влияют форма и физические свойства земной поверхности. Особенно сильное влияние на распространение радиоволн оказывают слои ионизированного газа в верхних слоях атмосферы. Эти слои, их еще называют ионосферой, ионизируются электромагнитным излучением Солнца и потоком заряженных частиц, излучаемых им. При этом, проводящая электрический ток ионосфера отражает все радиоволны, длина волны которых превышает 10 метров. Поэтому распространение таких волн на большие расстояния происходит только за счет многократных отражений от поверхности Земли и ионосферы.
Если же мы будем использовать радиоволны с длиной волны значительно превышающей 100 метров, то сможем создать устойчивую радиосвязь между удаленными точками на земной поверхности вне прямой видимости. Все дело в том, что такие волны (а это длинные волны) способны огибать выпуклую поверхность Земли. Причем это огибание будет выражено тем сильнее, чем больше длина волны.
А вот если использовать ультракороткие радиоволны, длина волны которых менее 10 метров, то можно выйти на связь с международной космической станцией. Дело в том, что такие волны могут свободно проходить через ионосферу и при этом практически не огибают земную поверхность.
Помимо всего вышеперечисленного, радиоволны, как и любые другие электромагнитные волны, распространяются прямолинейно и отражаются от преград.
Эти свойства радиоволн используются во многих отраслях современного мира. Об одном таком использовании поговорим более подробно. А именно, разговор пойдет о радиолокации.
История развития радиолокации своими корнями уходит в 1898 год, когда Александр Степанович Попов пытался осуществить радиосвязь между двумя кораблями, находящимися на расстоянии 5-ти километров друг от друга. В определенный момент после четкого и довольно устойчивого сигнала передатчика неожиданно обнаружился эффект затухания радиосигнала, который вскоре пропал. Как оказалось, в этот самый момент между двумя подопытными кораблями проходил третий. Это, можно сказать, и были первые эксперименты в области радиолокации. Тогда стало ясно, что электромагнитные волны можно использовать не только для связи, но и для обнаружения объектов в воздухе. Однако, в то время, применить практически открытую возможность дальнего видения никому не удалось.
Активное развитие радиолокации началось во время второй мировой войны. В Советском Союзе, Великобритании и США стали производить радары для раннего обнаружения самолетов вражеской авиации.
Современные локаторы засекают цели не только на сверхдальних расстояниях, но и за оптически непрозрачными преградами. Причем видят они не только неодушевленные объекты, но и живые организмы.

Что же такое радиолокация? Этот вопрос почти наверняка не у кого не вызовет затруднений. Хотя и не все непосредственно занимаются радиолокацией, но интернет, телевидение и документальные фильмы достаточно хорошо познакомили нас с вращающимися антеннами и серьезными сосредоточенными лицами операторов, которые вглядываются в слабо светящиеся экраны, мерцающие таинственными световыми пятнами — отметками целей.

Согласно Википедии: «Радиолокация — область науки и техники, объединяющая методы и средства локации (обнаружения и измерения координат) и определения свойств различных объектов с помощью радиоволн». Необходимо разобраться, что это значит.
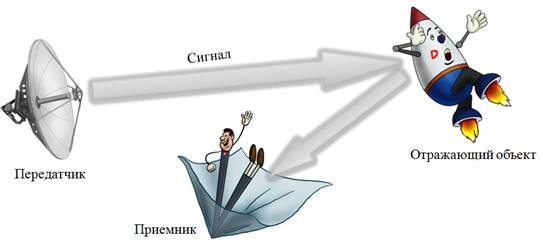
Излучается радиоволна в пространство (это делает передатчик) и ожидается, когда появится отраженный сигнал. О его приходе извещает приемник радиолокационной станции, который снабжен огромной антенной для улавливания слабых отраженных сигналов. Если вокруг нет никаких предметов, которые отражали бы радиоволны, то отраженного сигнала не будет. Но, вероятнее всего, что радиоволна встретит на своем пути какое-то препятствие. В этом случае происходит либо отражение радиоволны, либо ее рассеяние. При отражении та часть волны, которая попадает на отражающий объект, сохраняет свою структуру, но изменяет направление своего движения. И если отраженная волна попадает на антенну, то в приемнике радиолокационной станции появится довольно сильный сигнал. И чем больше площадь отражающего объекта, тем сильнее принятый сигнал и тем отчетливее отметка от цели на экране индикатора.
Это явление легко смоделировать в домашних условиях. Для этого нужно лишь маленькое зеркало и солнышко в окошке. Оно и будет выполнять роль передатчика радиолокационной станции. Зеркально отражающий объект — зеркальце, а в качестве приемника отраженного сигнала можно использовать, например, кошку. Пока солнечный зайчик будет бегать по ковру и стенам, кошка будет спокойно сидеть и недоуменно смотреть на Вас (отраженный сигнал не попадает в приемник). Но как только световое пятнышко попадет на нее, кошка зажмурится, и тем сильнее, чем больше будет зеркальце. Сигнал принят.
Известно, что для проведения радиолокационных наблюдений необходим передатчик, чувствительный приемник с антенной, сигнал и какой-нибудь отражающий объект.
Как организовать их совместную работу в тех или иных случаях? Существует довольно много схем построения радиолокационных станций, и каждой схеме соответствует тот или иной принцип работы. Рассмотрим импульсный радиолокатор.
Импульсный радиолокатор излучает радиоволны в виде коротких радиоимпульсов, длина каждого из них несколько тысячных или миллионных долей секунды. В момент излучения передатчиком радиоимпульса приемник радиолокатора отключают, чтобы мощный передаваемый сигнал не повредил его. Как только передатчик отключают, так сразу же включают приемник, который ждет появление слабого отраженного сигнала. Через некоторое время, когда придет отраженный сигнал или исчезнет всякая надежда на его появление, снова включают передатчик и отключают приемник. И такой цикл повторяют непрерывно, пока станция ведет радиолокационное наблюдение.
Работа такого радиолокатора напоминает поведение человека, который любит послушать обычное эхо. Каждый знает немало мест, где эхо слышно особенно хорошо. Найдите такое место, крикните какое-нибудь заветное слово и прислушайтесь. Если Вам повезло и Вы нашли удачное место, то эхо можно услышать два или даже три раза. Когда эхо замокнет, можете крикнуть еще раз, и снова услышите ответ. Но если кричать непрерывно, то ничего не услышите, так как сами себя оглушите криком. Так и радиолокационная станция прекращает излучение, чтобы можно было принимать слабые отраженные сигналы (кстати, специалисты называют их эхо-сигналами).
Как же с помощью радиолокации определяется местоположение объекта? Станция включилась в работу. Сигнал срывается с передающей антенны и со скоростью света устремляется к цели. Одновременно на экране индикатора световой луч развертки начинает свой путь из точки, которая обозначает место расположения станции (на экране появляется всплеск около нулевой отметки шкалы дальности). Система развертки устроена таким образом, что при отсутствии цели луч будет все время прочерчивать на экране светящуюся горизонтальную линию (но будем все-таки считать, что цель есть). Вот сигнал достиг цели, отразился от нее и, вернувшись к станции, попал на огромное полотнище приемной антенны. И в этот момент луч сделает на экране засечку — цель обнаружена. То же происходит и со всеми последующими сигналами. Если цель приблизится к станции, то сигнал совершит свое путешествие к ней и обратно быстрее, а значит и луч развертки раньше засветит отметку от цели. Так как скорость, с которой путешествует сигнал, постоянна, то время, прошедшее с момента излучения сигнала до его приема, пропорционально удвоенному расстоянию до цели. Поэтому выбрав подходящий коэффициент пропорциональности, можно измерить расстояние на индикаторе, которое успел пробежать луч развертки за это время, непосредственно в километрах или милях. Так получается шкалу дальности на экране индикатора. Теперь достаточно заметить цифру, у которой возникает отметка от цели, чтобы сказать, на какой дальности она находиться.

где R – расстояние до цели.
В настоящее время радиолокация занимает существенную нишу как в военно-оборонной сфере, так и в гражданской. Радиолокационные установки обнаруживают корабли и самолеты на расстоянии до нескольких сот километров. Во все крупных аэропортах мира локаторы следят за взлетающими и идущими на посадку воздушными судами. Все современные корабли и самолеты также снабжены радиолокаторами, которые служат им для навигационных целей. Их используют службы погоды для наблюдения за облаками. И наконец, локаторы активно используются в наблюдениях за космическими объектами и в исследовании космоса.


А теперь, разобравшись с некоторыми аспектами радиолокации, настало время поговорить еще об одном способе использования радиоволн. А именно речь пойдет о телевидении.
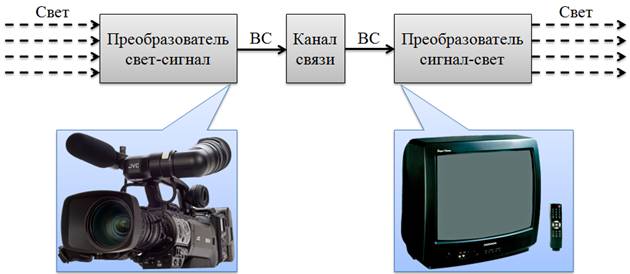
Современная телевизионная система состоит из трех узлов, каждый из которых выполняет свою четко сформулированную задачу. Так, преобразователь свет-сигнал (это может быть, например, видеокамера) из поступающего на его вход оптического изображения формирует электрический сигнал, который принято в телевидении называть сигналом изображения или видеосигналом.
Видеосигнал, в свою очередь, передается по каналу связи и затем в месте приема преобразуется в изображение на телевизионном экране.
Наиболее часто в настоящее время в качестве преобразователя сигнал-свет используются приемные телевизионные трубки (кинескопы), жидкокристаллические экраны, проекционные кинескопы и т.д.
Несмотря на простоту схемы телевизионной системы, необходимо отметить, что ТВ устройства являются едва ли не самыми сложными из радиоэлектронных устройств. Это связанно с тем, что телевидение постоянно развивается и совершенствуется, вбирая в себя новейшие достижения науки и техники и стимулируя, в свою очередь, их развитие. Современный этап развития телевидения характеризуется интенсивным внедрением цифровых технологий обработки сигналов, использованием достижений твердотельной электроники, созданием и развитием цифрового спутникового телевидения, разработкой и внедрением ТВ систем высокой четкости.

Любопытным в истории развития телевидения является тот факт, что основополагающие принципы телевидения были сформированы более века назад. Идея создания первой телевизионной системы была предложена Джоном Керри. В 1875 году он предложил телевизионную систему с разбиением изображения на отдельные элементы (так называемое мозаичное изображение). А в 1880 году российский ученый Порфирий Иванович Бахметьев предложил информацию о каждом из элементов изображения извлекать, передавать по каналу связи и воспроизводить последовательно с помощью телевизионной развертки.
За прошедший век в телевидении произошли существенные изменения, связанные с общим техническим процессом. На смену оптико-механическим ТВ системам невысокого качества пришли системы электронного телевидения. Черно-белое (монохромное) телевидение повсеместно вытеснено системами цветного ТВ вещания. Аналоговое телевидение постепенно превращается в цифровое. Не исключена возможность внедрения в обозримом будущем стереоскопического телевидения. Однако, несмотря на столь очевидный прогресс, телевидение развивалось и развивается в рамках направления, ограниченного вышеупомянутыми предложениями Джона Керри и Порфирия Бахметьева. И действительно, понятие элемента изображения (пиксел) является фундаментальным в современном телевидении, а развертка — основным технологическим процессом при анализе и синтезе телевизионного изображения.
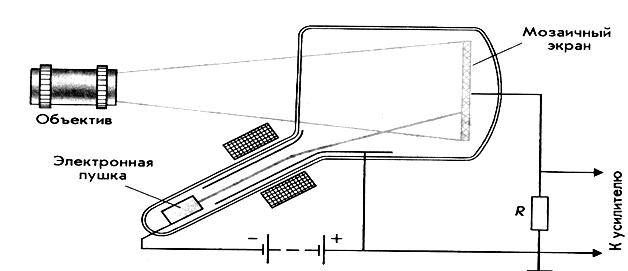
Принцип действия современной системы визуального телевидения основан на использовании процесса развертки, осуществляемого дважды — на передающей и приемной сторонах.
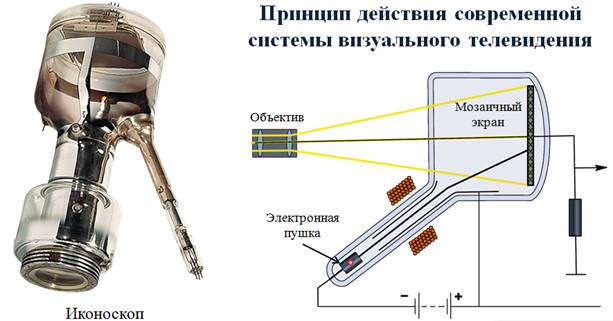
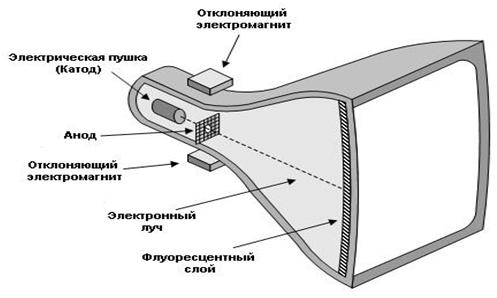
В процессе развертки на передающей стороне формируется видеосигнал, при этом происходит пространственно-временная дискретизация, т.е. разложение изображения на кадры, строки и элементы. Это происходит благодаря передающей вакуумной трубки, называемой иконоскопом. Внутри такой трубки располагается мозаичный экран, на который проецируется изображение объекта. Под действием падающей на ячейки световой энергии, каждая из них определенным образом заряжается. Далее, с помощью электронной пушки формируется электронный пучок, который поочередно попадает на все элементы мозаики от строчки к строчке. При этом изменяется заряд каждой ячейки мозаики.
После передачи данного видеосигнала по каналу связи производится восстановление телевизионного изображения с помощью видеоконтрольного устройства. Синтез изображения как операция, обратная разложению, также связан с процессом развертки, которая производится синтезирующей апертурой в плоскости изображения. В качестве синтезирующей апертуры в ТВ приемниках в настоящее время наиболее широко используется подвижное световое пятно, возникающее в результате взаимодействия сфокусированного электронного луча высокой энергии с катодолюминофором, нанесенным на экран кинескопа — приемной телевизионной электронно-лучевой трубки. Системы катушек горизонтального и вертикального отклонения заставляют такой луч сканировать весь экран точно так же, как электронный луч сканирует мозаичный экран в передающей трубке. Вследствие чего и возникает свечение экрана в местах попадания луча, а мы с вами наслаждаемся просмотром любимой телепередачи или фильма.

Конечно, был рассмотрен самый простой способ передачи изображения на расстояние — черно-белое. Получение цветного изображения сходно с получением черно-белого, однако в нем изображение разлагается на видеосигнал, несущий компоненты, соответствующие основным цветам спектра — красному, синему и зеленому.

В настоящее время развитие различных средств связи не стоит на месте. Они постоянно совершенствуются и находят все более новые области своего применения. Даже такой традиционный вид связи, как почтовое сообщение (доставка сообщений в письменном виде) претерпел существенные изменения. И теперь, на смену старинным почтовым каретам пришли железные дороги и самолеты.
Еще совсем недавно междугородняя телефонная связь осуществлялась только по воздушным линиям связи, на надежность которых оказывали влияние многочисленные факторы: грозы, сильные ветра и обледенение проводов. Сейчас же широко применяются кабельные и радиорелейные линии, сотовая мобильная связь и многое другое.
С развитием техники совершенствуется и аппаратура средств связи. Например, на смену простой телефонной связи пришли цифровые телекоммуникационные системы, которые обладают огромными функциональными возможностями.
Однако настоящей революцией в развитии средств связи, наверное, следует считать появление всемирной системы общедоступных электронных сетей — Интернет. Компьютерный мир уже давно стал сетевым. И появление Интернета, позволило людям со всех стран и всех континентов обмениваться огромными объемами различной информации.
Основные определения, термины
и понятия по военно-технической подготовке
- Военно-техническая подготовка
- Тактитка зенитных ракетных войск
- Боевое применение зенитного ракетного комплекса
5.1. Основные свойства радиоволн и методы радиолокации
5.1.1. Основные свойства радиоволн, используемые в радиолокации
Основные свойства радиоволн, используемые в радиолокации:
1. Постоянство скорости распространения радиоволн в однородной среде.
Скорость распространения радиоволн в воздухе принимается равной скорости ЭМВ в вакууме
Это свойство используется для определения дальности до цели по времени запаздывания радиосигнала на пути РЛС-цель-РЛС.
В диэлектрике скорость распространения радиоволн v меньше чем вакууме и определяется выражением

,
где: e и m - относительные диэлектрическая и магнитная проницаемости среды (e ³1; m ³1).
2. Прямолинейность пути распространения радиоволн.
Несмотря на возможное искривление пути распространения радиоволн под влиянием неоднородности атмосферы (рефракция) в радиолокации с высокой эффективностью используется допущение о прямолинейности распространения радиоволн.
Это свойство используется для определения угловых координат цели по направлению прихода отраженного от нее сигнала.
3. Отражение радиоволн от границы двух сред.
Отражение радиоволн (вторичное излучение радиоволн) для радиолокационных объектов бывает: зеркальное, резонансное и диффузное.
Зеркальное отражение наблюдается, если размер объекта много больше длины облучающей радиоволны, а поверхность объекта гладкая (размеры неоднородностей на поверхности значительно меньше длины облучающей радиоволны).
При зеркальном отражении выполняются законы геометрической оптики.
Примеры зеркального отражения радиоволн: отражение радиосигнала от ровной земной или водной поверхности, фокусировка луча в зеркальной антенне.

Рис.1. Зеркальное отражение радиоволн от земной (водной) поверхности

Рис.2. Принцип действия зеркальной антенны Кассегрена
Резонансное отражение происходит при условии, что размеры объекта или отдельных его частей кратны половине длины облучающей волны. В этом случае может возникать резонансное вторичное излучение большой интенсивности.
Пример резонансного отражения радиоволн - отражение радиосигнала от облака пассивных помех, состоящего из полуволновых отрезков проводника.
Диффузное отражение имеет место, когда линейные размеры объекта или его отдельных элементов сравнимы или больше длины облучающей волны.
Длину волны РЛС следует выбирать так, чтобы цель была диффузным отражателем.

Рис.3. Диффузное отражение радиоволн
4. Изменение частоты радиосигнала при отражении его от движущегося объекта (эффект Доплера).
Эффект Доплера стоит в том, что если объект отражающий или излучающий сигнал движется, то неподвижный наблюдатель зафиксирует изменение частоты принимаемого сигнала. Если объект движется к наблюдателю – частота сигнала растет, если от наблюдателя – уменьшается.
Наглядной иллюстрацией влияния скорости объекта на частоту является звук тепловозного гудка, который слышат пассажиры на неподвижном перроне: у приближающегося тепловоза звук гудка кажется выше, у удаляющегося – ниже.
На основании эффекта Доплера определяется радиальная скорость цели Vr .
Непосредственно измеряется так называемая «доплеровская добавка частоты»

,
как разность между частотами излученного ( fизл ) и принятого от цели ( fприн ) сигналов.
Радиальная составляющая скорости движения цели определяется в соответствии с выражением:

,
где: l –длина волны излученного РЛС сигнала.
5. Интерференция радиоволн.
Интерференция радиоволн, геометрическое сложение в пространстве двух (или нескольких) волн, при котором в разных точках получается усиление или ослабление амплитуды результирующей волны. Интерференция возможна, если волны когерентны.
Простейший случай интерференции - сложение двух волн одинаковой частоты при совпадении направления их распространения. В этом случае, для синусоидальных (гармонических) колебаний, амплитуда результирующей волны в какой-либо точке пространства

,
где A1 и A2 — амплитуды складывающихся волн, а φ - разность фаз между ними в рассматриваемой точке.
Разность фаз φ изменяется от точки к точке и в пространстве получается распределение амплитуд результирующей волны с чередующимися максимумами и минимумами. Иллюстрирует эту картину опыт Юнга, выполненный в оптическом диапазоне.
Явление интерференции сонаправленных волн широко используется при создании антенных систем с заданной формой диаграммы направленности. Именно интерференция позволяет создать узкую диаграмму направленности ФАР, состоящей из множества слабонаправленных излучателей.

Рис.4. Интерференция световых волн в опыте Юнга
Другой важный случай интерференции - сложение двух волн, распространяющихся в противоположных направлениях (например, прямой и отражённой). В этом случае получаются стоячие волны - характерное для интерференции распределение амплитуд с чередующимися максимумами и минимумами вдоль оси распространения волн остаётся неподвижным в пространстве (или перемещается столь медленно, что за время, необходимое для наблюдений, максимумы и минимумы не успевают сместиться на величину, сравнимую с расстоянием между ними).
Стоячие волны используются в объемных резонаторах.
В волноводных трактах и в антенных системах стоячие волны - негативный фактор, для минимизации которого все элементы волноводов и антенн должны быть согласованы между собой по величине волнового сопротивления. В случае рассогласования между элементами тракта, ЭМВ будет частично отражаться от места их соединения и в волноводе возникнет стоячая волна.
5.1.2. Методы измерения дальности
а) Метод непосредственного измерения . Непосредственно измеряется время распространения радиоволн от РЛС до цели и обратно tз , его называют временем запаздывания отраженного сигнала:

,
где: 
- время приема и излучения сигнала.
Дальность цели определяется в соответствии с выражением:

,
где с = 3∙108 м/сек.
б) Частотный метод измерения дальности. Используется с ЗС в виде длинного ( 
) ЛЧМ радиоимпульса с законом изменения частоты

,
f н – начальное значение частоты, как правило совпадает со значением несущей частоты;
f к – максимальное значение частоты, достигаемое к концу импульса;

В течение времени 
в РЛС одновременно присутствуют ЗС и принятый сигнал, задержанный на tз . За это время дальность определяется по разнице частот сигналов

,

.
Если цель движется, существует ненулевая доплеровская добавка частоты F д ¹ 0. Поэтому процедура частотного измерения дальности включает три последовательных этапа:
3) определяется дальность.
в) В системах активной локации с активным ответом кроме времени запаздывания tз , появляется еще время срабатывания ответчика (ретранслятора) t ср . Это время необходимо ответчику на прием ЗС, его анализ, формирование и излучение в пространство ответного сигнала.
Для исключения различия времен срабатывания t ср у различных ответчиков, фиксированное время срабатывания t ср фикс конструктивно вносится во все ответчики.
Время запаздывания в этом случае определяется как

,
а дальность вычисляется как в способе а).
г) В системах пассивной радиолокации определение дальности основывается на различных вариантах триангуляционных (основанных на свойствах треугольников) измерений.
Для построения измерительного треугольника используются две точки приема – основная А и дополнительная Б, разнесенные на фиксированное расстояние d, называемое базой измерения, третьей вершиной треугольника является цель.

Непосредственно измеряются углы e, a, a1, а дальность находится из соотношения:

.
5.1.3. Методы измерения угловых координат
Для измерения угловых координат антенны должны быть узконаправленными.
а) Метод максимума является простейшим методом измерения угловых координат. Применяется в обзорных РЛС.
Для определения значения азимута β организуется круговое сканирование ДН с заданной угловой скоростью wл. Измеряемым параметром является время от момента прохождения лучом направления на север (t=0) до момента получения максимума отраженного от цели сигнала tц. Азимут цели рассчитывается из соотношения:
Азимут цели рассчитывается из соотношения βц= tц´ wл.

Недостатком метода максимума является низкая точность измерения углов, сравнимая с шириной ДН (минимальная практически достижимая ширина составляет 0,7°).
б) Методы моноимпульсной пеленгации (мгновенной равносигнальной зоны) основаны на суммарно-разностной обработке принимаемых сигналов.
Суммарно-разностная обработка требует использования нескольких ДН (по паре на каждую измеряемую угловую координату), рассогласованных между собой. Такие ДН называются парциальными . Величина угла рассогласования Dj находится в пределах от половины до полной ширины лепестка ДН. Направление пересечения ДН1 и ДН2 принято называть равносигнальным направлением (РСН) . Рабочая область измерителя ограничена максимумами парциальных диаграмм.

В рабочей области для измерения угла φ сигналы, принятые ДН1 (А1) и ДН2 (А2), используются в разностном и суммарном каналах РПрУ:
А1-А2= АD - разностный канал;
А1+А2= АS - суммарный канал.
Сигнал разностного канала АD - пропорционален ошибке между РСН и направлением на цель, а сигнал суммарного канала АS - используется для нормировки этой ошибки.
Достоинством моноимпульсных методов является высокая точность измерения (ошибки составляют единицы угловых минут), а недостатками являются сложность антенной системы и невозможность измерения, если цель выходит за пределы рабочей области.
5.1.4. Методы измерения радиальной скорости
Радиальная скорость цели Vr . (проекция линейной скорости цели Vц на линию РЛС - цель) определяется на основании эффекта Доплера.
Непосредственно измеряется так называемая «доплеровская добавка частоты» как разность между частотами излученного ( fизл ) и принятого от цели ( fприн ) сигналов

.
Радиальная составляющая скорости движения цели определяется в соответствии с выражением:

,
где: l –длина волны излученного РЛС сигнала.
F д и Vr имеют положительные значения если цель приближается к РЛС, и отрицательные - если цель удаляется от РЛС.
Для измерения радиальной скорости, как правило, используются устройства, построенные на узкополосных частотных фильтрах.
Для оценки радиальной скорости (например, в доплеровских РЛС обнаружения) как правило, формируется набор фильтров, полосы пропускания которых равны Dfф, следуют одна за другой и перекрывают весь диапазон возможных доплеровских добавок.
Количество фильтров зависит от возможного диапазона скоростей цели или от диапазона скоростей, представляющих интерес для работы конкретной РЛС. Ширина полосы пропускания каждого фильтра согласуется с частотными характеристиками ЗС.
В этом случае, чтобы оценить радиальную скорость цели достаточно определить номер фильтра, на выход которого прошел сигнал - «звенящий фильтр» и воспользоваться соотношением F д = F д min + n´Dfф .

5.1.5. Радиолокационная информация
Радиолокационная информация (РЛИ) - информация о воздушной обстановке, полученная радиолокационными методами.
РЛИ включает : сведения о наличии или отсутствии в пространстве целей, их координатах и траектории, информацию о действующих помехах.
Сведения о наличии или отсутствии целей определяются для каждого элемента разрешения в зоне видимости РЛС.
Для однозначного определения положения цели в трехмерном пространстве РЛС необходимо определить три координаты цели. Поскольку, большинство РЛЦ являются высокоподвижными объектами, необходимо измерять и их скорость, ее принято считать еще одной - четвертой измеряемой координатой.

На основании физических свойств радиоволн непосредственно измеряются:
- дальность до цели Дц - расстояние между точкой стояния РЛС и целью (иногда ее называют наклонной дальностью);
- угловые координаты - углы наклона линии РЛС – цель в вертикальной ( угол места цели e ) и горизонтальной ( азимут b ) плоскостях относительно горизонта и направления на север соответственно.
- радиальная скорость цели Vr - проекция линейной скорости цели Vц на линию РЛС - цель.

Для определения траектории движения цели необходимо многократно последовательно во времени измерять значения координат цели, а затем связать полученные точки единой линией.
Информация о действующих помехах отображается на индикаторах РЛС, а также на индикаторных элементах системы помехозащиты.

Рис.3. Вид экрана индикатора кругового обзора
РЛИ получают РЛС на основе анализа параметров радиосигналов целей и помех.
РЛИ в ЗРС используется для отображения воздушной обстановки на индикаторах, планшетах обстановки и т.п., а также для решения задач пуска и наведения ЗУР.
5.1.6. Методы радиолокации
Для получения РЛИ используют следующие методы:
Метод активной радиолокации с пассивным ответом основан на облучении цели радиосигналом ( активная локация ) и приеме отраженных (рассеянных) целью радиоволн приемным устройством РЛС ( пассивный ответ ). Применяется, как правило, для поиска целей и измерения их координат.
Метод активной радиолокации с активным ответом – при облучении цели радиосигналом от РЛС ( активная локация ) срабатывает установленный на цели ретранслятор (ответчик), который излучает ответный радиосигнал с заданными параметрами ( активный ответ ). Эти сигналы принимаются РЛС. Применяется, как правило, для определения государственной принадлежности целей и для определения координат ЗУР.
Метод пассивной радиолокации заключается в приеме сигналов собственного радиоизлучения целей (радиотепловое излучение тел, излучение собственных радиотехнических устройств и др.). Применяется, как правило, для определения угловых координат целей – постановщиков активных помех.
Комбинационные методы , наиболее широко распространены в современных многофункциональных РЛС, они включают в себя вышеперечисленные методы в различных сочетаниях.

Радиолокация - это совокупность научных методов и технических средств, служащих для определения координат и характеристик объекта посредством радиоволн. Исследуемый объект часто именуют радиолокационной целью (или просто целью).
Принцип радиолокации
Радиотехническое оборудование и средства, предназначенные для выполнения задач радиолокации, получили название радиолокационных систем, или устройств (РЛС или РЛУ). Основы радиолокации базируются на следующих физических явлениях и свойствах:
- В среде распространения радиоволны, встречая объекты с иными электрическими свойствами, рассеиваются на них. Волна, отраженная от цели (или ее собственное излучение), позволяет радиолокационным системам обнаружить и идентифицировать цель.
- На больших расстояниях распространение радиоволн принимается прямолинейным, с постоянной скоростью в известной среде. Это допущение делает возможным измерение дальности до цели и ее угловых координат (с определенной ошибкой).
- На основании эффекта Доплера по частоте принятого отраженного сигнала вычисляют радиальную скорость точки излучения относительно РЛУ.
Историческая справка
На способность радиоволн к отражению указывали великий физик Г. Герц и русский электротехник А.С. Попов еще в конце XIX века. Согласно патенту от 1904 года, первый радар создал немецкий инженер К. Хюльмайер. Прибор, названный им телемобилоскопом, использовался на судах, бороздивших Рейн. В связи с развитием авиационной техники применение радиолокации выглядело очень перспективным в качестве элемента противовоздушной обороны. Исследования в этой области велись передовыми специалистами многих стран мира.
В 1932 году основной принцип радиолокации описал в своих работах научный сотрудник ЛЭФИ (Ленинградского электрофизического института) Павел Кондратьевич Ощепков. Им же в сотрудничестве с коллегами Б.К. Шембель и В.В. Цимбалиным летом 1934 года был продемонстрирован опытный образец радиолокационной установки, обнаружившей цель на высоте 150 м при удалении 600 м. Дальнейшие работы по совершенствованию средств радиолокации сводились к увеличению дальности их действия и повышению точности определения местоположения цели.

Виды радиолокации
Природа электромагнитного излучения цели позволяет говорить о нескольких видах радиолокации:
- Пассивная радиолокация исследует собственное излучение (тепловое, электромагнитное и т.п.), которое генерирует цели (ракеты, самолеты, космические объекты).
- Активная с активным ответом осуществляется в случае, если объект оборудован собственным передатчиком и взаимодействие с ним происходит по алгоритму "запрос - ответ".
- Активная с пассивным ответом предполагает исследование вторичного (отраженного) радиосигнала. Радиолокационная станция в этом случае состоит из передатчика и приемника.
- Полуактивная радиолокация - это частный случай активной, в случае когда приемник отраженного излучения расположен вне РЛС (например, является конструктивным элементом самонаводящейся ракеты).
Каждому виду свойственны свои достоинства и недостатки.

Методы и оборудование
Все средства радиолокации по используемому методу разделяют на РЛС непрерывного и импульсного излучения.
Первые содержат в своем составе передатчик и приемник излучения, действующие одновременно и непрерывно. По этому принципу были созданы первые радиолокационные устройства. Примером такой системы могут служить радиоальтиметр (авиационный прибор, определяющий удаление летательного аппарата от поверхности земли) или известный всем автолюбителям радар для определения скоростного режима транспортного средства.
При импульсном методе электромагнитная энергия излучается короткими импульсами в течение нескольких микросекунд. После генерации сигнала станция ведет работу только на прием. После улавливания и регистрации отраженных радиоволн РЛС передает новый импульс и циклы повторяются.
Режимы работы РЛС
Существует два основных режима функционирования радиолокационных станций и устройств. Первый - сканирование пространства. Он осуществляется по строго заданной системе. При последовательном обзоре перемещение луча радара может носить круговой, спиральный, конический, секторный характер. Например, решетка антенны может медленно поворачиваться по кругу (по азимуту), одновременно сканируя по углу места (наклоняясь вверх и вниз). При параллельном сканировании обзор осуществляется пучком радиолокационных лучей. Каждому соответствует свой приемник, ведется обработка сразу нескольких информационных потоков.
Режим слежения подразумевает постоянную направленность антенны на выбранный объект. Для ее поворота, согласно с траекторией движущейся цели, используются специальные автоматизированные следящие системы.
Алгоритм определения дальности и направления
Скорость распространения электромагнитных волн в атмосфере составляет 300 тыс. км/с. Поэтому, зная время, затраченное транслируемым сигналом на преодоление расстояния от станции до цели и обратно, легко вычислить удаленность объекта. Для этого необходимо точно зафиксировать время отправки импульса и момент принятия отраженного сигнала.
Для получения информации о местонахождении цели используется остронаправленная радиолокация. Определение азимута и элевации (угла места или возвышения) объекта производится антенной с узким лучом. Современные РЛС используют для этого фазированные антенные решетки (ФАР), способные задавать более узкий луч и отличающиеся высокой скоростью вращения. Как правило, процесс сканирования пространства совершается минимум двумя лучами.
Основные параметры систем
От тактических и технических характеристик оборудования во многом зависит эффективность и качество решаемых задач.
К тактическим показателям РЛС причисляют:
- Зону обзора, ограниченную минимальной и максимальной дальностью обнаружения цели, допустимым азимутальным углом и углом возвышения.
- Разрешающую способность по дальности, азимуту, элевации и скорости (возможность определять параметры рядом расположенных целей).
- Точность измерений, которая измеряется наличием грубых, систематических или случайных ошибок.
- Помехозащищенность и надежность.
- Степень автоматизации извлечения и обработки поступающего потока информационных данных.
Заданные тактические характеристики закладываются при проектировании устройств посредством определенных технических параметров, среди которых:
- несущая частота и модуляция генерируемых колебаний;
- диаграммы направленности антенн;
- мощность передающих и принимающих устройств;
- габаритные размеры и масса системы.
На боевом посту
Радиолокация - это универсальный инструмент, получивший широкое распространение в военной сфере, науке и народном хозяйстве. Области использования неуклонно расширяются благодаря развитию и совершенствованию технических средств и технологий измерений.
Применение радиолокации в военной отрасли позволяет решить важные задачи обзора и контроля пространства, обнаружения воздушных, наземных и водных мобильных целей. Без радаров невозможно представить оборудование, служащее для информационного обеспечения навигационных систем и систем управления орудийным огнем.
Военная радиолокация является базовой составляющей стратегической системы предупреждения о ракетном нападении и комплексной противоракетной обороны.

Радиоастрономия
Посланные с поверхности земли радиоволны также отражаются от объектов в ближнем и дальнем космосе, как и от околоземных целей. Многие космические объекты невозможно было полноценно исследовать лишь с использованием оптических инструментов, и только применение радиолокационных методов в астрономии позволило получить богатую информацию об их природе и структуре. Впервые пассивная радиолокация для исследования Луны была применена американскими и венгерскими астрономами в 1946 году. Примерно в то же время были случайно приняты и радиосигналы из космического пространства.
У современных радиотелескопов приемная антенна имеет форму большой вогнутой сферической чаши (подобно зеркалу оптического рефлектора). Чем больше ее диаметр, тем более слабый сигнал антенна сможет принять. Часто радиотелескопы работают комплексно, объединяя не только устройства, расположенные недалеко друг от друга, но и находящиеся на разных континентах. Среди важнейших задач современной радиоастрономии - изучение пульсаров и галактик с активными ядрами, исследование межзвездной среды.

Гражданское применение
В сельском и лесном хозяйстве радиолокационные устройства незаменимы при получении информации о распределении и плотности растительных массивов, изучении структуры, параметров и видов почв, своевременном обнаружении очагов возгораний. В географии и геологии радиолокация используется для выполнения топографических и геоморфологических работ, определения структуры и состава пород, поиска месторождений полезных ископаемых. В гидрологии и океанографии радиолокационными методами осуществляется контроль состояния главных водных артерий страны, снегового и ледяного покрова, картографирование береговой линии.
Радиолокация - это незаменимый помощник метеорологов. РЛС легко выяснит состояние атмосферы на удалении десятков километров, а по анализу полученных данных составляется прогноз изменения погодных условий в той или иной местности.

Перспективы развития
Для современной радиолокационной станции главным оценочным критерием выступает соотношение эффективности и качества. Под эффективностью понимаются обобщенные тактико-технические характеристики оборудования. Создание совершенной РЛС - сложная инженерная и научно-техническая задача, осуществление которой возможно только с использованием новейших достижений электромеханики и электроники, информатики и вычислительной техники, энергетики.
По прогнозам специалистов, в ближайшем будущем главными функциональными узлами станций самого разного уровня сложности и назначения будут твердотельные активные ФАР (фазированные антенные решетки), преобразующие аналоговые сигналы в цифровые. Развитие вычислительного комплекса позволит полностью автоматизировать управление и основные функции РЛС, предоставив конечному потребителю всесторонний анализ полученной информации.
Весь мир в твоих руках - все будет так, как ты захочешь
Весь мир в твоих руках - все будет так, как ты захочешь
- Физика школьникам
- Физика студентам
- Астрономия
- Информатика
- ПОКС
- Арх ЭВМ и ВС
- Методические материалы
- Медиа-файлы
- Тестирование
Как сказал.
Вопросы к экзамену
Для всех групп технического профиля
Урок 47-2 (дополнительный материал). Принципы телевидения. Применение радиосвязи.
- " onclick="window.open(this.href,'win2','status=no,toolbar=no,scrollbars=yes,titlebar=no,menubar=no,resizable=yes,width=640,height=480,directories=no,location=no'); return false;" rel="nofollow"> Печать
Телевидение. Основные принципы.
Телевидение — система связи для трансляции и приёма движущегося изображения и звука на расстоянии.
Телевидение основано на принципе последовательной передачи элементов изображения с помощью радиосигнала или по проводам. Разложение изображения на элементы происходит при помощи диска Нипкова, электронно-лучевой трубки или полупроводниковой матрицы. Количество элементов изображения выбирается в соответствии с полосой пропускания радиоканала и физиологическими критериями. Для сужения полосы передаваемых частот и уменьшения заметности мерцания экрана телевизора применяют чересстрочную развёртку. Также она позволяет увеличить плавность передачи движения.
Схема телевидения в основном совпадает со схемой радиовещания. Разница заключается в том, что в передатчике колебания модулируются не только звуковыми сигналами, но и сигналами изображения. Оптические сигналы в передающей телекамере преобразуются в электрические. Модулированная электромагнитная волна переносит информацию на большие расстояния. В телевизионном приемнике высокочастотный сигнал делится на три сигнала: сигнал изображения, звуковой сигнал и сигнал управления. После усиления эти сигналы поступают в свои блоки и используются по назначению.
Телевизионный тракт в общем виде включает в себя следующие устройства:
1. Телевизионная передающая камера. Служит для преобразования изображения, получаемого при помощи объектива на мишени передающей трубки или полупроводниковой матрице, в телевизионный видеосигнал. Для воспроизведения движения используют принцип кино: изображение движущегося объекта (кадра) передают десятки раз в секунду (в телевидении 50 раз). Преобразование изображения кадра в электрические сигналы производится с помощью иконоскопа.
Иконоскоп - передающая вакуумная электронная трубка, преобразующая изображение кадра в серию электрических сигналов.
На экран иконоскопа проецируется изображение объекта с помощью оптической системы (объектива). Такой же сигнал получается в телевизионном приемнике, где сигнал преобразуется в видимое изображение на экране кинескопа.
2. Телекинопроектор. Преобразует изображение и звук на киноплёнке в телевизионный сигнал, и позволяет демонстрировать кинофильмы по телевидению.
3. Видеомагнитофон. Записывает и в нужный момент воспроизводит видеосигнал, сформированный передающей камерой или телекинопроектором.
4. Видеомикшер. Позволяет переключаться между несколькими источниками изображения: камерами, видеомагнитофонами и другими.
5. Передатчик. Несущий сигнал высокой частоты модулируется телевизионным сигналом и передается по радио или по проводам.
6. Приёмник — телевизор. С помощью синхроимпульсов, содержащихся в видеосигнале, телевизионное изображение воспроизводится на экране приемника (кинескоп, ЖК-дисплей, плазменная панель).
Кинескоп - приемная вакуумная электронная трубка, преобразующая электрические сигналы в видимое изображение.

Кроме того, для создания телевизионной передачи используется звуковой тракт, аналогичный тракту радиопередачи. Звук передаётся на отдельной частоте обычно при помощи частотной модуляции, по технологии, аналогичной FM-радиостанциям. В цифровом телевидении звуковое сопровождение, часто многоканальное, передаётся в общем с изображением потоке данных.
Телевизионные радиосигналы передаются в диапазоне ультракоротких волн, т. е. в пределах прямой видимости антенны. Для передачи сигнала на большие расстояния используют ретрансляторы (телепередатчики). Зона уверенного приема телевидения увеличивается благодаря использованию ретрансляционных спутников.
Башня Останкинского телецентра высотой 540 м обеспечивает прием в радиусе 120 км.
Применение радиосвязи
В наш технический век радиосвязь глубоко проникла в повседневную жизнь.
Мобильная связь. Абсолютное большинство современных людей не мыслят своей жизни без мобильного телефона. Но редко кто из них догадывается о том, что мобильный телефон – это аппарат, совмещающий в себе функции приёмника и передатчика, а мобильная связь осуществляется с помощью тех же обыкновенных радиоволн.
Радиотелефонная связь. Там, где используют рации – различные приёмопередающие устройства (полиция, скорая помощь, МЧС и т.п.), связь также осуществляется с помощью радиоволн.
Приём телевизионных сигналов с помощью антенн, которые устанавливаются на крышах домов, постепенно уходит в прошлое. Тем не менее, те же самые радиоволны переносят изображение
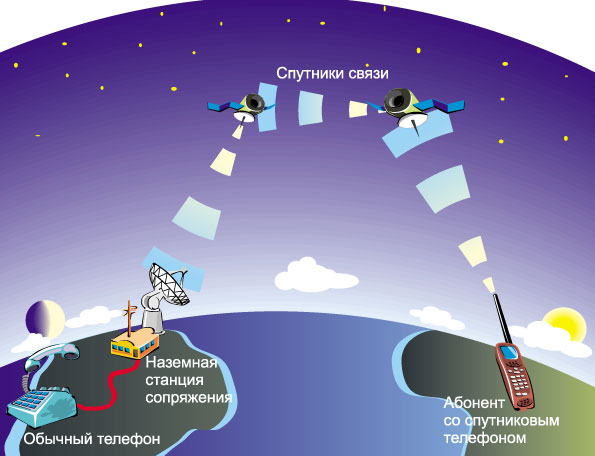
Спутниковые телевидение, телефонная связь, Интернет – всё это существует, благодаря радиоволнам, которые излучаются передатчиком, ретранслируются спутником и достигают приёмника.
Беспроводные мышь, клавиатура и гарнитура также содержат миниатюрные приёмопередатчики, работающие в радиоволновом диапазоне.
Biuetooch, Wi-Fi, беспроводные компьютерные сети – это также передатчики и приёмники радиоволн.
Различные радиоуправляемые модели обязательно имеют блок управления (передатчик) и приёмник в самой модели.
GPS, ГЛОНАСС – глобальные системы позиционирования, с помощью которых можно определить не только своё место положения, но и многое другое – работают также в радиоволновом диапазоне.
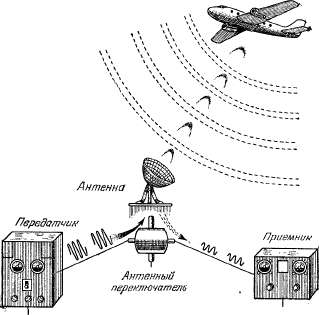
Радиолокация. А.С. Попов ещё в 1900 году обнаружил отражение электромагнитных волн от кораблей и указал на возможность использования этого эффекта в радиолокации. Позднее было обнаружено, что практически все вещества отражают радиоволны. Результат отражения зависит не только от рода вещества, но и от длины волны. Суть радиолокации заключается в следующем. Передатчик вырабатывает высокочастотный импульс и с помощью специальной параболической антенны посылает его в направлении объекта, например, самолёта. Радиоволна, достигая объекта, отражается от него во все стороны. Часть отражённой волны, энергия которой очень мала, улавливает приёмная параболическая антенна. Зная время t между моментом излучения и моментом приёма сигнала, легко рассчитать R расстояние до объекта: R=ct/2 , где с – скорость распространения радиоволны.
Разумеется, это самая примитивная схема радиолокации. В настоящее время анализ принятого сигнала выполняется специализированным компьютером, который определяет не только расстояние, но и скорость, тип объекта, автоматически анализирует «свой-чужой», сравнивает с базой данных и выдает его тактико-технические характеристики и т.д. Имеются мобильные радиолокационные комплексы и мощные стационарные системы, отслеживающие одновременно сотни объектов вблизи поверхности Земли и в космосе над половиной территории России.
В радиоастрономии радиолокационными методами определяют расстояния до небесных тел, отслеживают движение астрономических объектов.
В космонавтике – следят за положением и перемещением различных космических аппаратов.
Карта поверхности Венеры, скрытой мощным облачным покровом, была составлена с помощью радиолокации.
Читайте также: